
智能车辆作为智能交通系统的关键技术之一,是许多高新技术综合集成的载体。它体现了车辆工程、人工智能、自动控制及计算机技术于一体的综合技术,是未来汽车发展的趋势。本文提出了一个基于STM32F103芯片为控制核心,附以红外传感器采集外界信息和检测障碍物的智能小车系统设计方案。充分利用该芯片高速运算、处理能力,来实现小车自动识别路线按迹行走、躲避障碍物,并且通过LCD显示器实时显示小车运动参数,使用芯片自带的PWM输出功能,步进调节占空比来调节电机的转速。通过模糊控制和PWM脉宽调制技术的结合,提高了对车位置控制精度。
根据题目中的设计要求,本系统主要由主控单片机模块、电源模块、电机驱动模块、黑线检测模块、液晶显示模块以及电源模块构成。本系统的方框图如图1所示。
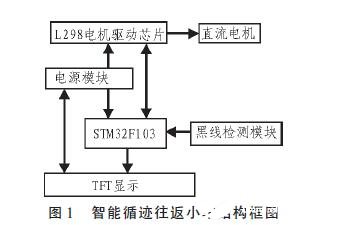

控制器主要用于控制电机的运动,黑线的检测以及相关信息的显示。本设计采用STM32作为控制器,其性能优良,移植性好,提高了对直流电机的控制效率,并对控制系统进行模块化设计,有利于智能小车的功能扩展和升级。本系统的核心控制板是STM32F103的最小系统,它由电源电路、实时时钟、系统时钟电路、JTAG接口电路、复位电路、用户LED和按键电路、串口电路等组成。
本小车由于需要倒车,为了倒车的准确性在小车的前后两端分别安装了两个红外传感器,小车前端两个红外传感器检测的到的信号输入单片机GPIOB12、GPIOB13,而后端两个红外传感器检测的到的信号输入单片机GPIOB12、GPIOB13,单机片经处理后通过GPIOE3-GPIOE6驱动电路控制直流电机的转向;显示模块以2.4寸tft为核心,对记录的结果进行显示。
该智能小车在贴有黑线的白纸“路面”上行驶,因此本模块设计需要检测铺在行驶区的黑胶带,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”———黑线。本文采用的是简单实用的检测方法,即红外探测法。采用红外线控制的反射式红外对管,红外对管只对红外线具有较高灵敏度,从而避免了外界光线的干扰;跑道黑带能够吸收红外线,而白色跑道能够反射红外线,从而检测到跑道黑带。
采用反射式光电开关来识别轨迹上的黑线标记信号,这种光电开关的红外发射管和接收管位于同一侧[3],光敏三极管只能接收反射回的红外光。当车身下面是黑线时,由于黑线吸收部分光,光敏三极管接收到的红外光不能使光敏三极管导通,光电开关输出高电平,经非门输出低电平。反之,当车身下面是白色的地面时,红外发射管发射的光经其反射后,被接收管接受,光电开关输出低电平,经非门整形后输出高电平。将非门的输出接至单片机IO口。车在前进和后退过程中,小车每过一道黑线,便产生一次电平变化,主程序从而调用相应的子程序,随着小车的不断行驶,相应的程序依次被调用执行,使小车在跑道上按设计要求时快、时慢、时前进、时后退。
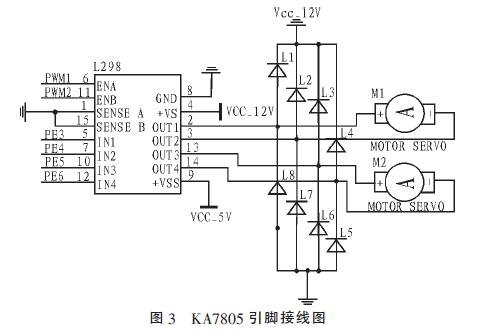
采用双H桥驱动芯片L298。其内部包含4通道逻辑驱动电路,可以方便的驱动两个直流电机,或一个两相步进电机。控制芯片的驱动使能端就可以控制驱动电机的速度。L298芯片采用5V(VSS)与12V(VS)直流供电,ENA和ENB分别用STM32F103主控芯片的TIM3_CH3和PB1/ADC_IN9/TIM3_CH4控制,产生PWM1和PWM2两路PWM波输出,IN1-IN4分别用PE3-PE6实现I/O输出控制电机转动方向。在L298与电机之间加入二极管,以保护电路。
如图2所示,小车运动状态通过电机A和B的不同方向转动来实现,电机有正转、反转和停止3种状态,每个电机由一对I/O口进行控制。表1是I/O端口状态与电机制动对照表。
液晶显示模块使用2.4寸TFT触摸屏,由STM32的FSMC接口通过ILI9325驱动芯片驱动触摸屏。该驱动芯片支持240RGB×320像素,可以显示262144真色彩。支持MVA(Multi_domainVerticalAligement多范围垂直队列)宽视角显示,组合720通道源极驱动和320通道门极驱动,其内部集成172800字节的GRAM(图形内存),以及高速内存脉冲写功能等功能。
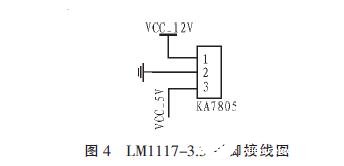
由于各电路模块所需电压不同,本设计需多种电源供电。STM32F103主控芯片采用3.3V供电,电机驱动采用5V与12V,红外收发检测电路采用5V,液晶显示与触角传感电路均采用3.3V供电。外部电源采用12V的直流电压,因此根据设计要求,本设计进行了电源转换设计。
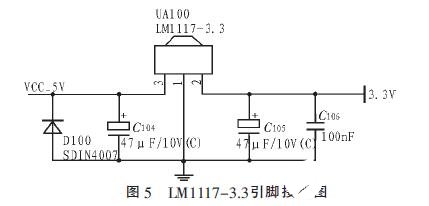
1)采用KA7805芯片实现12V到5V的转换。KA7805的作用是输入大于5V的直流电压,输出5V的直流电压,且管脚较少,易于连接和实现,稳定性高。图4为KA7805芯片引脚接线V,具体电路设计如图5所示。
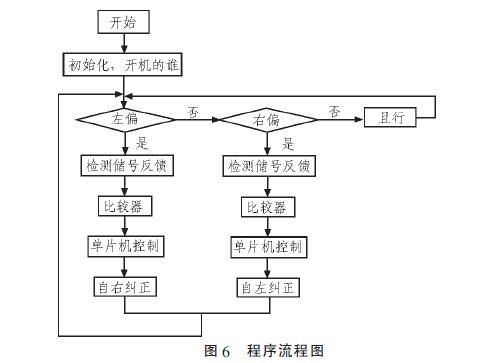
系统软件设计采用C语言编程实现,利用单片机PWM输出模块和普通I/O模块,根据系统需求,对各个模块进行初始化配置,以实现其相应功能。主程序流程如图6所示。
文中根据设计内容和要求,制定了设计方案,并逐步完成了硬件和软件部分的设计。整个系统以STM32为主控芯片,实现对小车简单运动的控制,完成各部分电路设计并使用PROTEL画出电路设计原理图;软件部分在STM32集成开发环境IAREWARM5.3下编写各模块程序,包PWM波输出模块、液晶显示模块自由行走避障模块和红外循迹模块,并通过主控制程序将各模块融合一起。整个设计将硬件与软件相结合,实现对小车的控制,使小车能够做出前进、后退、左转、右转等动作,并通过液晶显示器实时显示小车的运动参数,及对小车速度进行调节,并且能够在不同模式下通过传感检测电路实现简单的避障和循迹功能,在本次设计中将PWM波占空比控制在1/2以下,使小车不会因速度过高而导致转弯过程中其方向不易控制。论文基本完成了硬件和软件的设计,并使之符合设计要求。本设计与实际应用相结合,利用高性能的STM32F103芯片,辅以各种传感器来检测路面、障碍物等周围环境,通过高可靠性的软件设计,来实现小型电动车的智能控制,具有很强的现实意义。
关键字:引用地址:一个基于STM32芯片设计的智能循迹往返小车上一篇:对STM32内部FLASH编程时遇到的ADC异常问题下一篇:
现代仪器仪表的智能化趋势使得各种传感器的应用日益广泛。由于激光具有许多优点,使得利用这些特性研发的激光检测和控制系统具有先进的技术性能、方便的使用性能和简洁的系统结构。激光传感器一般是由激光发生器、光学零件和光电器件所构成的,它能把被测物理量(如距离、流量、速度等)转换成光信号,然后应用光电转换器把光信号变成电信号,通过相应电路的过滤、放大和整流得到输出信号,从而算出被测量。借助于激光所具有的优点(如方向性好、亮度高、单色性好、相干性好等),激光传感器通常具有结构简单可靠、抗干扰能力强、非机械接触、分辨率高、精度高、示值误差小、稳定性好、宜用于快速测量等优点。 随着科技的不断发展,国家对治超工作的要求也不断提高,无论是从效率还
据外媒报道,塔塔集团子公司Tata Elxsi研发了新型智能停车解决方案,可以帮助驾驶员节省时间和免去寻找停车位的麻烦。 (图片来源:Tata Elxsi) Tata Elxsi与全球顶级的OEM和一级供应商合作,研发了先进辅助停车系统和自动停车等智能停车解决方案,还研发了一个自动驾驶平台Autonomai。作为该平台的一部分,该公司研发了两种智能自动停车解决方案——利用记忆停车(Park By Memory)以及停车位探测(Parking Slot Detection)。 Park By Memory(PBM)是一种由驾驶员训练汽车如何在狭窄道路或拥挤停车场等有限制的地区停车的技术,该系统会学习用户所执行的停车操作
自行停车 /
之前一直以为STM32flash空间大小和hex文件相关,以为hex文件大小超过flas大小后程序就会出问题但是我发现hex文件大于flash也可以正常下载,有的程序也可以正常运行,有的不可以,所以经过总结如下: 1、flhex文件其实是个格式规范的文本文件。程序代码大小与hex文件大小没有绝对的关联性,因为我们在用串口下载程序时一般都是用的hex文件下载,,所以大家会以为hex文件大小和flash大小息息相关,hex文件大小超过了flash大小就会出问题,我也以为是这样,直到最近我发现有hex文件大于flash的大小但是依然可以写进去,因为真正烧写进去的是二进制文件,在hex文件中包含了bin文件的信息 2、hex文件大
0 引言 全球定位系统GPS是目前被全世界广泛应用的一个导航定位系统,该系统可以为军用、民用领域的用户提供精确的定位、测速、授时服务。目前,大到飞机、舰船,小到人们掌中的手机电话,只要装备必要的GPS模块,都可方便享受GPS提供的精确快捷服务。在汽车上装配GPS终端.只要轻轻一点,人们便可以在GPS的辅助下放心行遍天下。GPS终端除了可以被个人汽车用户使用外,还可以为拥有大量车辆的公司集团用户提供服务,比如出租车公司、公交公司等大集团用户,可以利用GPS的相关服务,对所属车辆进行集中监控管理。本文介绍了一种基于GPS相关服务,为大集团客户量身定作,集车辆管理、定位、安全防盗为一体的车辆智能管控系统(下面简称管控系统)。 1
以下为.h文件: #ifndef __TM1640_H__ #define __TM1640_H__ #include stm32f10x.h #define ADDR_START1640 0XC0 #define DSP1640_DIS 0 #define DSP1640_ENB 1 /* 控制显示 0x88,0x89,0x8a,0x8b,0x8c,0x8d,0x8e,0x8f 分别对应 1/16, 2/16, 4/16, 10/16, 11/16, 12/16, 13/16, 14/16 设置数据,0x40,0x44分别对应地址自动加一和固定地址模式 */
驱动程序 /
据外媒报道,德国 豪华车 制造商梅赛德斯-奔驰(奔驰)推出了新一代智能手机应用。新款应用可以让车主与奔驰车始终连接在一起,还能够通过应用界面远程检查车辆状态、激活某些控制功能、安排服务或在所处的地方呼叫路边援助服务。 (图片来源:戴姆勒) 新一代应用包括三款应用,分别为“Mercedes me”应用、“Mercedes me Store”应用以及“Mercedes me Service”应用,可在2019款或更新款的奔驰车型上使用。未来,所有Mercedes me应用都可紧密连接在一起,即只需使用Mercedes me ID登录一次,就可以在各个应用程序之间快速直观地进行切换。每个应用都有其特定功能,在视觉和内容上都能适
状态 /
STM32驱动OTP语音芯片NV020C。控制程序实现按键驱动和一线C,语音芯片使用广州九芯电子有限公司产品,该公司语音芯片丰富,有OTP以及FLASH+主控芯片多种产品;由于对方服务态度很好,支持审样,实验中还送了一个喇叭,并帮忙焊接了部分外围芯片,借此帮他们公司做个宣传。感谢朋友们多多支持。 NV020C.H文件 #include stm32f10x.h ////////////////////////////////////////////////////////////////////////////////// //本程序只供学习使用,未经作者许可,不得用于其它任何用途 //
STM32芯片架构 STM32F103系列芯片的系统架构如下: STM32芯片基于ARM公司的Cortex-M3内核,由ST公司设计生产,内核与总线矩阵之间有I(指令)、S(系统)、D(数据)三条信号线。内核通过总线矩阵与FLASH、SRAM、外设连接。而外设包括GPIO、USART、I2C、SPI等。 STM32芯片系统结构 STM32F103 系列芯片(不包含互联网型)的系统结构如下: 从上图可以看出,在小容量、中容量和大容量产品中,主系统由以下部分构 成: 四个驱动单元: Cortex-M3 内核 DCode 总线(D-bus) Cortex-M3 内核系统总线(S-bus) 通用 DMA1 通用 DMA2 四个被动
系统结构 /
自动控制系统(原书第10版) (法里德·高那菲(Farid Golnaraghi) etc.)
嵌入式工程师AI挑战营(初阶):基于RV1106,动手部署手写数字识别落地
有奖直播 瑞萨新一代视觉 AI MPU 处理器 RZ/V2H:高算力、低功耗、实时控制
【下载】LAT1396 STM32CubeIDE实用技巧之STM32H7双核调试的配置
【下载】LAT1343 STM32H5 USBD Classic驱动 CDC移植
【下载】LAT1392 LTDC RGB接口 LCD的TouchGFX工程的移植步骤
【直播】4月11日,STM32Trust如何帮助新产品设计提升信息安全保护能力
【线日,基于Buildroot制作STM32MP13启动镜像-深圳/厦门/西安/郑州/苏州
【新品】STM32U0新一代超低功耗入门级MCU,助力终端产品省电,安全,BOM成本低
【新品】 STM32H7R/S基于Cortex-M7,运行频率高达600 MHz,板载闪存型MCU 拥有高速的外部存储
【新品】STM32WBA54/55 支持BLE5.4、IEEE 802.15.4通信协议、Zigbee®、Thread和Matter协议
【新品】STM32MP2 最高配备双核Arm® Cortex®-A35和Cortex®-M33的STM32MP2系列微处理器
【新品】STM32H5-Arm® Cortex®-M33 内核,主频高达250MHz,提升性能与信息安全性

ST(意法半导体)近日推出了全新的STM32U0微控制器,这款基于Cortex-M0+内核的产品,可以在带有实时时钟(RTC)的待机模式下,实现仅为160n ...
1 DMA概述直接存储器访问 (DMA) :用于在外设与存储器之间以及存储器与存储器之间进行高速数据传输。DMA传输过程的初始化和启动由CPU完 ...
在FreeRTOS中,队列是实现任务之间同步、互斥和通信的一种重要方法(其他的实现方法有:任务通知、事件组、信号量、互斥量)。任何任务都可 ...
01前言本文是上文 《STM32H5 DA 之初体验(带 TrustZone)》的后续之作。倘若你还没有阅读此文,那么建议你先阅读下,然后再回过头来阅读 ...
从51开始,单片机玩了很长时间了,有51,PIC,AVR等等,早就想跟潮流玩玩ARM,但一直没有开始,原因-----不知道玩了ARM可以做什么(对 ...

51单片机PIC单片机AVR单片机ARM单片机嵌入式系统汽车电子消费电子数据处理视频教程电子百科其他技术STM32MSP430单片机资源下载单片机习题与教程词云: